posted by rerofumi
2007/10/21 日曜日 20:03:22

この 2ヶ月間はVOCALOID2の「初音ミク」(とニコニコ動画)にかかりっきりで、コメを噛めとしての記事が完全に停滞していたあたり。
でもその間に電子工作をしていなかったかというとそんなこともなく。
というわけで、それら成果(と呼ぶにはちとしょぼい)を、後出しで掲載。
ニコニコ動画の空気がわからないと面白くないと思われるけれども、そのへんはご容赦。
まずはこちら。
初音ミクにネギを振らせるおもちゃを作ろうという各種工作動画があってその一つ。
コメを噛めらしくサーボモーターをマイコンで制御して動作させようという試み。
サーボモーターは電源とコントロール線の 3本のコードがあって、コントロール線に与える信号で回転位置の指定を行っている。
この信号は、50Hz(20ms)周期のパルスで、パルスの幅によって回転位置が決定する。
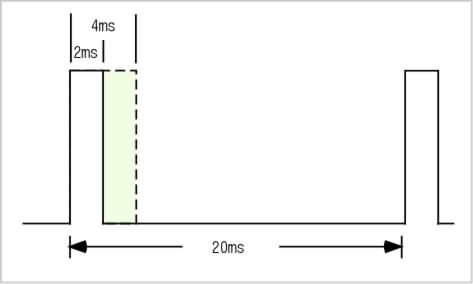
そのパルスの幅は周期の 1/10〜2/10 となっている。
この信号をマイコンで作り出せば良いのだけれども、そのためには割り込みかPWMかソフトウェアタイミングか、まあ如何様にもやり方がある。
今回はPSoCのPWMモジュールを使ってハードウェアにおまかせしてみた。CPUからは回転角を変えたくなったときにPWMカウンター設定を変更すれば良い。
PSoCのソースコードはこの後のPC経由Wiiリモコン制御の時に上書きして半分消してしまったので省略。すんません。

サーボモーターをパネルに取り付け。
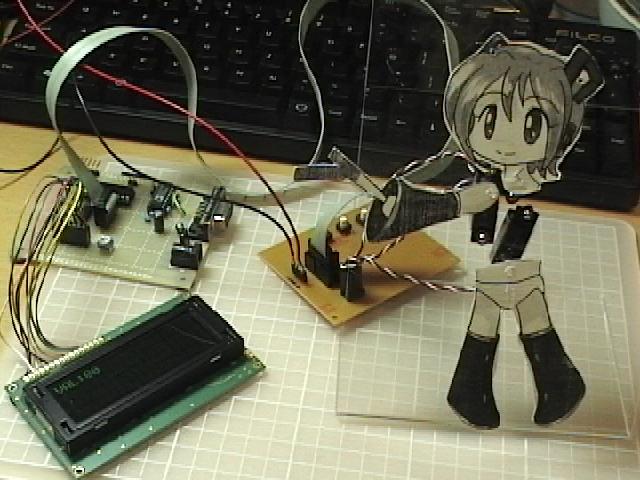
キャラクター玩具として組み立てる。
マイコン制御なので動作パターンもプログラミング次第というのがうれしい。
これ自体は他愛もないおもちゃだけれども、こういうのが積み重なってメカトロニクス制御になっていくのではないかと思う次第。
これ自体は大したものではなく、面白いと感じるかどうかは「初音ミク」と「ネギ回し」で楽しめるかどうかといったところですが。
Leave a Reply